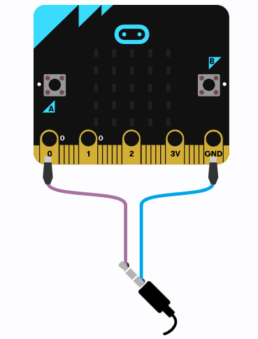
Show all Arduino Comunicação Displays Elétrica e Eletrônica Energia solar ESP8266 & ESP32 Módulos Motores Outros Projetos Raspberry Pi Sensores Sistemas Supervisórios Arduino – Entradas e Saídas Digitais – Pinos digitaisby Daniel Madeira Explorando o Mundo do Somby Karla Santiago Leitura da velocidade de ventoinha em RPMby José Morais Aprendendo a crimpar cabos de redeby Milhagem UFMG Explorando a Condutividade Elétrica com o micro:bitby Karla Santiago Como Instalar uma Biblioteca no Arduino IDEby Victor Passos Sensor de Movimento de Cabeça – ITG3205 + ADXL345 + HMC5883Lby Angelo Lyra O que é Algoritmo?by Allan Mota Criando um Contador de Passos Com o Microbitby Karla Santiago Módulo relé – Acionando cargas com Arduinoby Allan Mota ATtiny85 – Primeiros passosby José Morais Explorando a Luz: Transformando o micro:bit em um Sensor de Luminosidadeby Karla Santiago Display LCD 20×4 e 16×2 com Adaptador I2Cby Daniel Madeira Xbee – Comunicação entre Arduinosby Equipe MountainBaja Sensor Indutivo NPN de proximidade com Arduinoby Daniel Madeira Carrinho solar – Projeto social Solaresby Projeto Solares UFES Arduino IDE – Como Instalar e Configurarby Victor Passos Microsoft Excel com Arduino – Primeiros passosby Daniel Madeira Controlando seu projeto usando Telegram – ESPby José Morais Arduino – Grandezas digitais, analógicas e PWMby Daniel Madeira